

基础执行向智能感知演进,高性能与成本优化并行
【原报告在线阅读和下载】:202511【MKList.com】灵巧手行业深度报告:基础执行向智能感知演进,高性能与成本优化并行 | 四海读报
【迅雷批量下载】:链接:https://pan.xunlei.com/s/VOXJ23RJHhoECPL5FRrVathfA1 提取码:umqb
【夸克批量下载】:链接:https://pan.quark.cn/s/fe42cc605010 提取码:j4Vv

1. 一段话总结
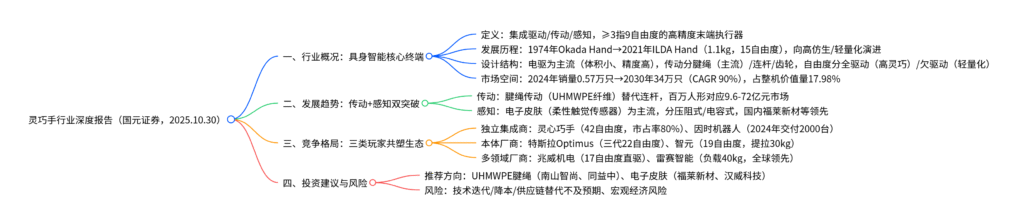
国元证券2025年10月30日发布的灵巧手行业深度报告指出,灵巧手作为具身智能核心执行终端,集成驱动、传动、感知三大模块,需满足≥3指9自由度的仿生设计要求,2024年中国市场销量约0.57万只,预计2030年达34万只(2024-2030年CAGR约90%),占人形机器人整机价值量17.98%;技术端腱绳传动(以UHMWPE纤维为核心材料,强度13倍于钢)凭借轻量化优势逐步替代连杆传动,电子皮肤(柔性触觉传感器) 赋予多维感知能力,成为突破“成本-性能-稳定性”不可能三角的关键;竞争端由独立集成商(灵心巧手市占率超80%)、本体厂商(特斯拉Optimus三代22自由度)、多领域厂商(兆威机电、雷赛智能)三类玩家主导,产品向高自由度(最高42自由度)、低成本(BOM降至万元内)迭代;投资建议关注UHMWPE腱绳材料(南山智尚、恒辉安防)及电子皮肤(福莱新材、汉威科技)相关标的,警惕技术迭代、降本不及预期等风险。
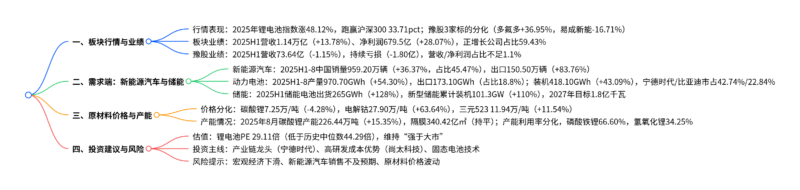
2. 思维导图(mindmap脑图)
3. 详细总结
一、报告基础信息
| 项目 | 内容 |
|---|---|
| 发布机构 | 国元证券 |
| 发布日期 | 2025年10月30日 |
| 分析师 | 龚斯闻(S0020522110002)、冯健然(S0020524090002)、许元琨(S0020523020002) |
| 核心主题 | 基础执行向智能感知演进,高性能与成本优化并行 |
二、行业概况:具身智能核心执行终端,市场快速扩张
1. 定义与核心特征
灵巧手是集成驱动、传动、感知三大模块的高精度末端执行器,需满足两大仿生条件:指关节可使物体任意运动、固定时限制物体运动,因此需≥3指、≥9自由度,核心功能是在极限/有害环境替代人类完成复杂操作(如抓取鸡蛋、拧螺丝)。
| 模块 | 核心构成 | 功能作用 |
|---|---|---|
| 驱动模块 | 电机(主流)、液压、气压、形状记忆合金 | 提供动力,电机驱动因体积小、精度高(输出力矩稳定)成为首选 |
| 传动模块 | 腱绳、连杆、齿轮、带传动 | 传递动力,腱绳传动(模拟人手肌腱)为当前主流趋势 |
| 感知模块 | 位置/视觉/力觉/触觉传感器 | 感知环境,力觉(六维力矩传感器)、触觉(电子皮肤)为高价值方向 |
2. 发展历程:五十年迭代,向高仿生/轻量化演进
| 阶段 | 时间 | 代表产品 | 核心突破 |
|---|---|---|---|
| 起步期 | 1974-2000年 | 日本Okada Hand(1974年,3指11自由度)、NASA Robonaut Hand(1999年,5指22自由度) | 实现基础仿生结构,确立“指+关节”设计框架 |
| 发展期 | 2001-2015年 | 德国DLR Hand(2001年,4指13自由度)、意大利Pisa/IIT Soft Hand(2014年,5指21自由度) | 传动方案优化,引入柔性材料,提升抓取适应性 |
| 加速期 | 2016-2025年 | 韩国ILDA Hand(2021年,1.1kg,15自由度)、灵心巧手L30(2024年,42自由度) | 轻量化(<1.5kg)、高自由度(最高42)、感知能力(电子皮肤)突破 |
3. 市场空间:销量高增,占整机价值近18%
- 价值占比:灵巧手占人形机器人整机价值量17.98%,仅次于旋转/线性执行器(均19.64%),是核心高价值部件。
- 销量预测:2024年中国灵巧手销量约0.57万只,预计2030年达34万只,2024-2030年复合增长率(CAGR)约90%,核心驱动人形机器人规模化落地(如特斯拉计划2026年末量产Optimus,目标年产能100万台)。
三、发展趋势:腱绳传动+电子皮肤,突破性能瓶颈
1. 传动技术:腱绳传动成主流,UHMWPE材料为核心
- 技术优势:腱绳传动通过柔性肌腱(置于前臂/机身)传递动力,解决传统连杆传动“笨重、柔性差”问题,实现“轻量化(减重30%+)+高自由度(支持20+自由度)”,是突破“成本-性能-稳定性”不可能三角的关键路线。
- 材料选择:主流为超高分子量聚乙烯纤维(UHMWPE),强度达13倍于钢、密度低(0.97g/cm³)、耐磨损,国内九州星际(产能3.2万吨/年)、同益中(强度42cN/dtex)等企业性能接近国际龙头Dyneema(SK99纤维强度42.5cN/dtex)。
- 市场空间:若2030年人形机器人出货100万台,N+1型腱绳(双手)对应市场规模9.6-37.2亿元,2N型对应17.6-72亿元(单根腱绳价格40-60元)。
2. 感知技术:电子皮肤赋能多维感知,国内厂商加速追赶
- 技术路线:触觉传感器分MEMS与柔性触觉传感器(电子皮肤),后者因柔韧性(适配任意载体)、高灵敏度(感知0.1-25N压力)成为主流,按信号原理可分为压阻式(结构简单、成本低)、电容式(精度高)、压电式(响应快)。
- 国内进展:福莱新材(压阻式电子皮肤)、日盈电子(电容式传感器)、汉威科技(多模态感知)已实现小批量应用,帕西尼感知DexH13 GEN2灵巧手搭载1140颗ITPU触觉传感单元,触觉信号路数达3420路,接近人类皮肤感知精度。
四、竞争格局:三类玩家共塑生态,产品迭代差异化
1. 竞争主体:三类玩家各有优势
| 玩家类型 | 核心特征 | 代表企业 | 产品亮点 |
|---|---|---|---|
| 独立集成商 | 产品成熟早、对外发售,国内单价5-10万元 | 灵心巧手(中国) | 最高42自由度,2024年市占率超80%,Linker Hand L30支持端云融合 |
| 因时机器人(中国) | 2024年交付2000台,自研微型伺服电缸,成本低(BOM<1.5万元) | ||
| Shadow Robot(英国) | 24自由度,NASA/高通合作,售价100-220万元 | ||
| 本体厂商 | 从整机向灵巧手延伸,匹配本体任务需求 | 特斯拉(美国) | Optimus三代22自由度,腱绳传动,计划2026年末量产 |
| 智元机器人(中国) | 19自由度,提拉30kg,2025年量产第1000台整机 | ||
| 宇树科技(中国) | Dex5-1灵巧手,指尖精度±1mm,2024年交付1500台整机 | ||
| 多领域厂商 | 跨界切入,依托核心部件技术积累 | 兆威机电(中国) | 全球首款指关节内置驱动,17自由度全直驱 |
| 雷赛智能(中国) | DH116灵巧手负载40kg(全球领先),自重仅490g | ||
| 强脑科技(中国) | Revo 2灵巧手仅383g(全球最轻),支持脑机控制 |
2. 产品迭代方向
- 高自由度:从11自由度(特斯拉初代)向22-42自由度(灵心巧手L30)演进,提升操作灵活性。
- 低成本:国内厂商通过自研核心部件(如因时机器人伺服电缸、傲意科技医疗供应链复用),将BOM成本从3万元降至1万元以内。
- 高负载:雷赛智能DH116最大负载40kg,智元灵巧手自锁提拉30kg,满足工业场景需求。
五、投资建议与风险提示
1. 投资建议:聚焦两大核心方向
- UHMWPE腱绳材料:推荐南山智尚(产能3600吨/年)、恒辉安防(产能3000吨/年)、同益中(强度42cN/dtex),受益于腱绳传动规模化应用。
- 电子皮肤(柔性触觉传感器):建议关注福莱新材(压阻式技术)、日盈电子(电容式传感器)、汉威科技(多模态感知),国内企业在成本与适配性上具备优势。
- 灵巧手整机及核心部件:关注灵心巧手(高自由度龙头)、兆威机电(直驱技术)、雷赛智能(高负载产品),优先选择工业场景率先验证的企业。
2. 风险提示
- 技术迭代不及预期:若传动(如新型材料替代UHMWPE)、感知(如算法无法匹配硬件)技术突破缓慢,将延缓产业化进程。
- 降本不及预期:核心部件(电机、传感器)成本若无法下降,可能导致灵巧手单价高于市场接受度(目标2030年降至2万元内)。
- 国产供应链替代不及预期:高端电机、减速器若依赖进口,可能受贸易摩擦影响,制约产能扩张。
4. 关键问题
问题1:灵巧手的核心技术瓶颈是什么?当前突破路径(传动+感知)的优势与商业化前景如何?
答案:灵巧手的核心技术瓶颈是“成本-性能-稳定性”不可能三角——高自由度(性能)通常伴随高成本与低稳定性,传统连杆传动因结构笨重、柔性差难以平衡三者。当前突破路径集中在传动与感知两大维度,具体优势及前景如下:
-
传动突破:腱绳传动+UHMWPE材料
- 优势:①轻量化:驱动单元外置于前臂,末端重量减轻30%+(如灵心巧手L30腱驱版仅1.3kg);②高自由度:支持20+自由度(特斯拉Optimus三代22自由度),模拟人手精细动作;③成本可控:UHMWPE材料国内产能充足(九州星际3.2万吨/年),单根腱绳价格40-60元,百万人形对应9.6-72亿元市场。
- 前景:2026年特斯拉、智元等整机厂量产后,腱绳传动渗透率有望从2024年30%提升至2030年70%,成为主流方案。
-
感知突破:电子皮肤(柔性触觉传感器)
- 优势:①多维感知:可检测压力(0.1-25N)、温度、纹理,帕西尼DexH13 GEN2搭载1140颗传感单元,接近人类皮肤精度;②适配性强:柔性材料可贴合任意关节,解决传统刚性传感器“适配难”问题;③成本下降:国内福莱新材、汉威科技通过工艺优化,将传感器单价从500元/片降至100元/片以下。
- 前景:2030年电子皮肤在灵巧手感知模块的渗透率有望达60%,带动相关市场规模超50亿元。
问题2:当前灵巧手市场的竞争格局如何?三类玩家(独立集成商/本体厂商/多领域厂商)的核心优势与目标场景有何差异?
答案:灵巧手市场由三类玩家主导,竞争格局呈现“国际领先、国内追赶”特征,三类玩家优势及场景差异显著:
| 玩家类型 | 核心优势 | 目标场景 | 代表企业案例 |
|---|---|---|---|
| 独立集成商 | ①产品成熟早(如Shadow 1997年成立);②技术聚焦(灵心巧手42自由度);③对外发售,适配多品牌整机 | 科研(高校/实验室)、工业柔性装配(3C/半导体) | 灵心巧手:2024年市占率超80%,Linker Hand L30用于科研与精密制造;Shadow:NASA采购用于太空实验 |
| 本体厂商 | ①与整机协同性强(运动控制、负载匹配);②场景定制化(按本体任务优化);③规模化后成本优势显著 | 本体配套(特斯拉Optimus、智元远征系列)、特定行业(如特斯拉目标工业/家庭) | 特斯拉:Optimus三代灵巧手匹配整机“危险/重复”任务,负载5kg;智元:19自由度灵巧手适配商用服务场景(迎宾/物流) |
| 多领域厂商 | ①核心部件自研(兆威机电微型电机、雷赛智能驱动器);②跨界技术复用(强脑科技脑机接口);③成本控制能力强(傲意科技BOM<1万元) | 工业量产(雷赛DH116负载40kg)、康复医疗(强脑科技Revo 2) | 雷赛智能:DH116用于工业搬运,2025年Q2量产试销;强脑科技:Revo 2用于截肢患者康复,全球最轻383g |
问题3:从市场空间与技术成熟度看,2025-2030年灵巧手行业的投资主线是什么?哪些企业具备核心竞争壁垒?
答案:2025-2030年灵巧手行业的投资主线为“技术突破+成本下降+场景落地”,聚焦腱绳材料、电子皮肤、高性价比整机三大方向,具备“技术壁垒+产能/客户优势”的企业将脱颖而出:
-
投资主线逻辑
- 技术突破:腱绳传动(UHMWPE)、电子皮肤(柔性传感器)解决“性能瓶颈”,是行业从“实验室”走向“量产”的关键;
- 成本下降:国内厂商通过供应链复用(傲意科技医疗供应链)、核心部件自研(因时机器人伺服电缸),将灵巧手单价从10万元降至2030年2万元内,打开消费/工业场景;
- 场景落地:优先布局工业(柔性装配)、康复医疗(脑机控制)场景,这类场景对价格敏感度低、需求刚性(如3C行业年需求超5万只)。
-
核心竞争壁垒与企业
- UHMWPE材料:壁垒为“产能规模+性能稳定性”,推荐南山智尚(产能3600吨/年,产品用于灵心巧手)、同益中(强度42cN/dtex,接近国际龙头);
- 电子皮肤:壁垒为“传感精度+成本控制”,建议关注福莱新材(压阻式技术,适配工业场景)、汉威科技(多模态感知,与本体厂合作);
- 灵巧手整机:壁垒为“自由度+场景适配”,推荐灵心巧手(42自由度,科研/工业双场景)、雷赛智能(40kg高负载,工业量产领先)。






暂无评论内容