

机器人需求驱动下,新技术落地加速
【原报告在线阅读和下载】:20260126【MKList.com】高端装备制造产业研究深度:机器人需求驱动下,新技术落地加速 | 四海读报
【迅雷批量下载】:链接:https://pan.xunlei.com/s/VOXJ23RJHhoECPL5FRrVathfA1 提取码:umqb
【夸克批量下载】:链接:https://pan.quark.cn/s/fe42cc605010 提取码:j4Vv
1. 一段话总结
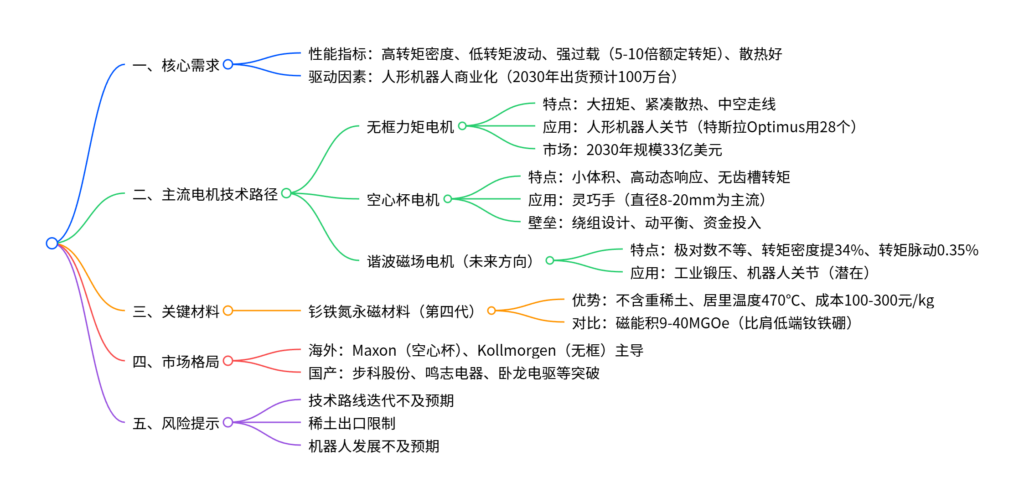
人形机器人需求爆发驱动电机技术加速落地,核心电机需满足高转矩密度、低转矩波动、强过载能力、优异散热四大关键指标,当前主流技术路径为无框力矩电机(人形机器人关节主力,大扭矩+紧凑结构)与空心杯电机(灵巧手核心,小体积+高精度),未来谐波磁场电机(磁路创新,转矩密度提升34%)与钐铁氮永磁材料(不含重稀土,居里温度470℃)成技术突破方向;市场呈现“海外主导、国产替代加速”格局,无框力矩电机全球规模2030年预计达33亿美元,需警惕技术路线迭代、稀土出口限制等风险。
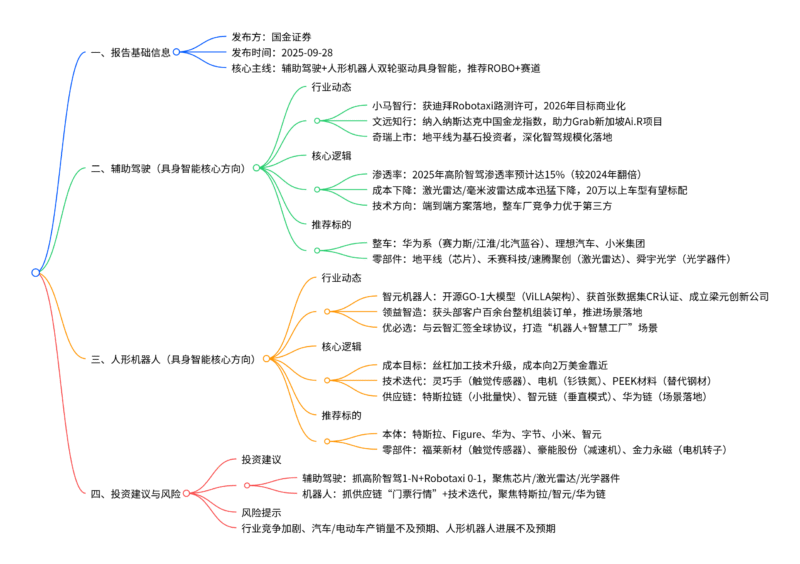
2. 思维导图(mindmap)
3. 详细总结
一、电机:人形机器人的动力核心
-
执行器与电机的关系
- 执行器是机器人关节运动核心,分为柔性执行器(FA)、弹性执行器(EA)、准直驱执行器(QDD),电机是执行器的核心部件,需配合传动结构适配不同关节需求。
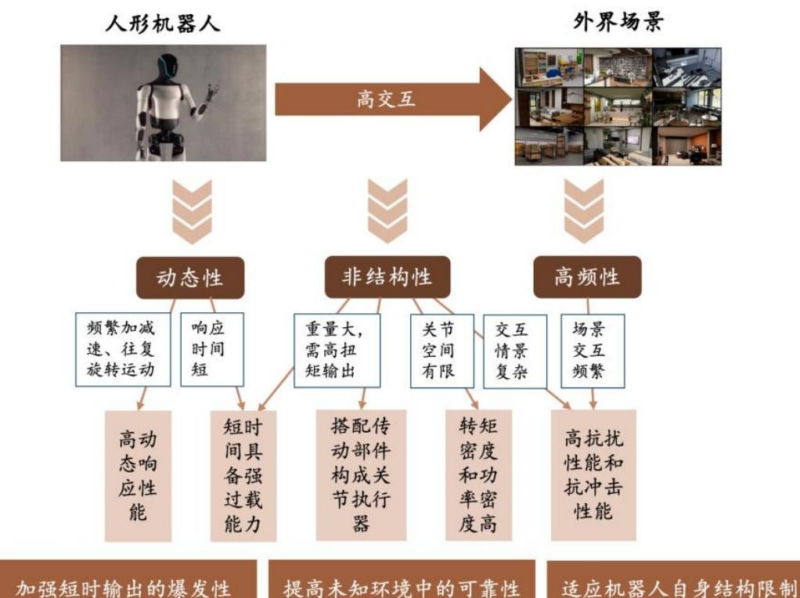
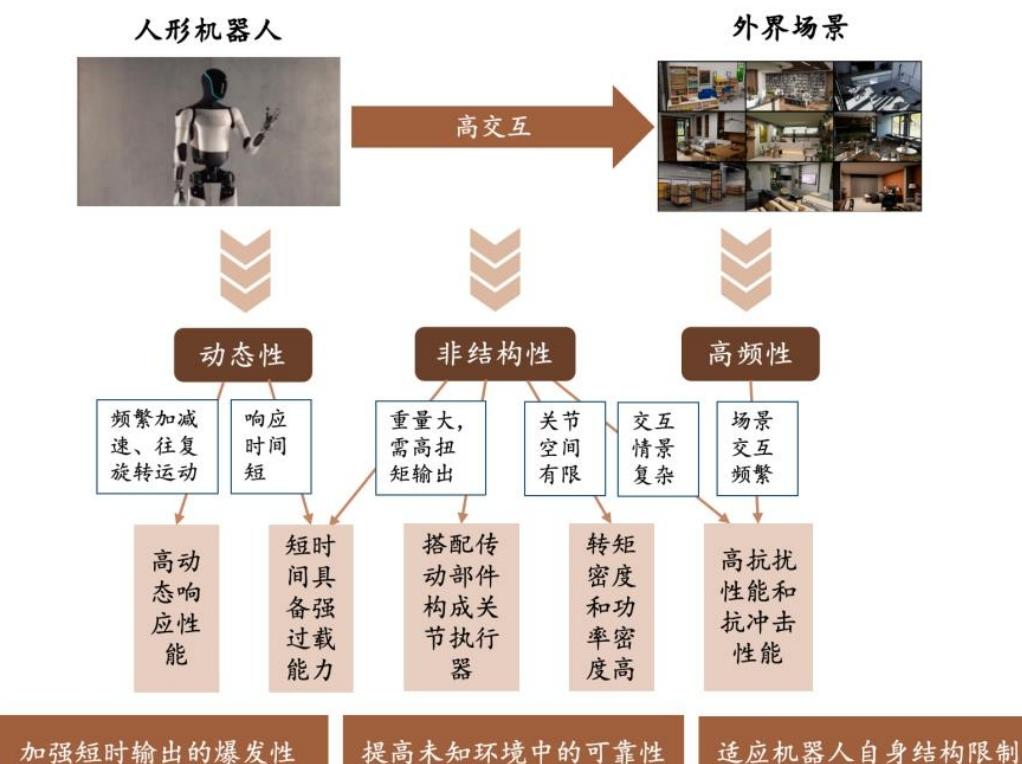
- 机器人电机与传统伺服电机差异:需强化短时爆发性、未知环境可靠性,适应关节空间限制,核心要求包括模块化设计、强过载能力、高动态响应、高功率/转矩密度。
-
电机分类及拓扑对比
拓扑类型 核心特点 转矩密度 成本 适用场景 典型应用 内转子径向磁通电机 结构简单、成本低 较低 低 微/小型机器人高动态关节 DelFly、Hummingbird 外转子径向磁通电机 大转矩、低转矩脉动 较高 中 高动态机器人下肢关节 Mini Cheetah、ARTERMIS 轴向磁通电机 轴向紧凑、高功率密度 高 高 大负载机器人关节 “青龙”机器人、电动牦牛 空心杯电机 无齿槽、动态响应快 低 高 灵巧手等精密关节 Pisa/IIT SoftHand、iLimb
二、无框力矩电机:关节的力量基石
-
核心优势与应用
- 结构特点:无壳体,仅含定子+转子,中空走线便于集成,直接耦合无背隙,系统刚度高、运行静音。
- 关键性能:智元远征A2 Max关节峰值扭矩达450Nm,特斯拉Optimus全身28个执行器均搭载该类型电机(14个旋转+14个线性)。
- 市场规模:2023年全球6.57亿美元,2030年预计达33亿美元(含人形机器人增量23.97亿美元)。
-
市场格局
- 海外主导:Kollmorgen(Tn 0.413-10.3Nm)、AEROTECH(Tp 0.82-116.4Nm)等掌握核心工艺。
- 国产突破:步科股份(特斯拉供应商,52-132mm规格)、昊志机电(转矩波动<1%,3.5倍过载)、雷赛智能(FM1系列小批量试产)。
三、空心杯电机:灵巧手的核心驱动
-
技术特点与需求
- 核心优势:无铁芯设计,能量转换效率65%-90%,机械时间常数<28ms,转速波动<2%,适配电池供电的长时间运行场景。
- 技术壁垒:绕组设计(专利集中在外资)、转子动平衡(磁性材料质量分布)、资金投入(单台绕组设备超百万)。
-
市场与国产进展
- 海外龙头:瑞士Maxon(ECX SPEED13L,零售2198元)、德国Faulhaber、瑞士Portescap主导8mm以下小尺寸市场。
- 国产替代:鸣志电器(13-30mm全型号,供应特斯拉Optimus)、兆威机电(突破4mm无刷空心杯)、鼎智科技(6-22mm规格)。
四、谐波磁场电机:未来技术方向
-
技术创新与优势
- 核心原理:打破传统电机励磁与电枢极对数相等限制,通过调制单元实现磁场转换,转矩新增“极比”放大系数。
- 性能突破:与传统电机相比,有效体积减小25%,转矩密度提升34%,转矩脉动仅0.35%,效率达93.4%。
-
应用与产业化
- 现有应用:工业直驱式锻压伺服电机(定子18槽、转子56极)。
- 潜在场景:人形机器人关节、灵巧手(解决功率密度不足痛点)。
- 产业化进展:美的集团、卧龙电驱(获湖北省技术发明奖)、德马科技(小批量生产)已布局。
五、第四代永磁材料:钐铁氮
-
核心优势
对比维度 钐铁氮 钕铁硼 铁氧体 居里温度(℃) 470左右 310左右 450-460 磁能积(MGOe) 9-40 26-55 0.5-4.5 成本(元/kg) 100-300 300-500 50-100 关键优势 不含重稀土、耐腐蚀 磁能积高 成本极低 应用场景 高温电机、机器人 各类电机、传感器 家电、低端电机 -
产业化进展:新莱福(量产准备)、北矿科技(产业化阶段)、万朗磁塑(中试阶段)等企业加速落地。
六、风险提示
- 技术路线迭代风险:谐波磁场电机磁路设计、钐铁氮量产工艺仍需优化。
- 稀土出口限制风险:重稀土出口管制可能导致原材料供应受限、成本上升。
- 机器人发展风险:人形机器人商业化节奏不及预期,影响电机增量需求。
4. 关键问题及答案
问题1:人形机器人对电机的核心性能要求是什么?当前主流技术路径如何适配这些需求?
- 答案:核心性能要求包括高转矩密度(有限空间输出大扭矩)、低转矩波动(精密操作需求)、强过载能力(短时峰值转矩达额定5-10倍)、优异散热(过载工况下快速散热)。主流技术路径适配逻辑:①无框力矩电机:以大扭矩、紧凑结构、中空走线适配人形机器人关节(如特斯拉Optimus),解决下肢负载与集成问题;②空心杯电机:以无齿槽设计、高动态响应(机械时间常数<28ms)适配灵巧手,满足精密抓取需求;③谐波磁场电机(未来):通过磁路创新提升34%转矩密度,解决功率密度不足痛点,适配高端关节场景。
问题2:无框力矩电机与空心杯电机的技术差异、应用场景分化及国产替代进展如何?
- 答案:技术差异:①无框力矩电机:大扭矩(Tp可达1789Nm)、高集成度、适配大尺寸关节;②空心杯电机:小体积(直径4-40mm)、低波动、适配微型精密关节。应用分化:无框力矩电机聚焦人形机器人躯干、四肢关节;空心杯电机聚焦灵巧手、微型关节。国产替代进展:无框力矩电机领域,步科股份(特斯拉供应商)、昊志机电实现技术突破,产品性能接近海外;空心杯电机领域,鸣志电器、兆威机电突破小尺寸技术,已供应特斯拉、华为等客户,但8mm以下高端市场仍依赖Maxon等海外厂商。
问题3:谐波磁场电机与钐铁氮永磁材料的技术协同性如何?产业化落地面临哪些关键瓶颈?
- 答案:技术协同性:谐波磁场电机的核心需求是高转矩密度与高温稳定性,钐铁氮永磁材料具备“不含重稀土、居里温度470℃、高电阻率”特点,可适配其磁路设计,同时降低成本与涡流损耗,二者形成“电机拓扑创新+材料升级”的协同突破。产业化瓶颈:①谐波磁场电机:磁路设计复杂,调制单元精度要求高,量产工艺不成熟;②钐铁氮永磁材料:磁能积略低于高端钕铁硼,量产过程中稳定性待提升;③系统适配:需与机器人关节执行器、减速器等集成,验证周期长。
© 版权声明
免费分享是一种美德,知识的价值在于传播;
本站发布的图文只为交流分享,源自网络的图片与文字内容,其版权归原作者及网站所有。
THE END









暂无评论内容