


【原报告在线阅读和下载】:20260331【MKList.com】电力设备与新能源行业:宇树G1人形机器人拆解报告 | 四海读报
【迅雷批量下载】:链接:https://pan.xunlei.com/s/VOXJ23RJHhoECPL5FRrVathfA1 提取码:umqb
【夸克批量下载】:链接:https://pan.quark.cn/s/fe42cc605010 提取码:j4Vv

一、一段话总结
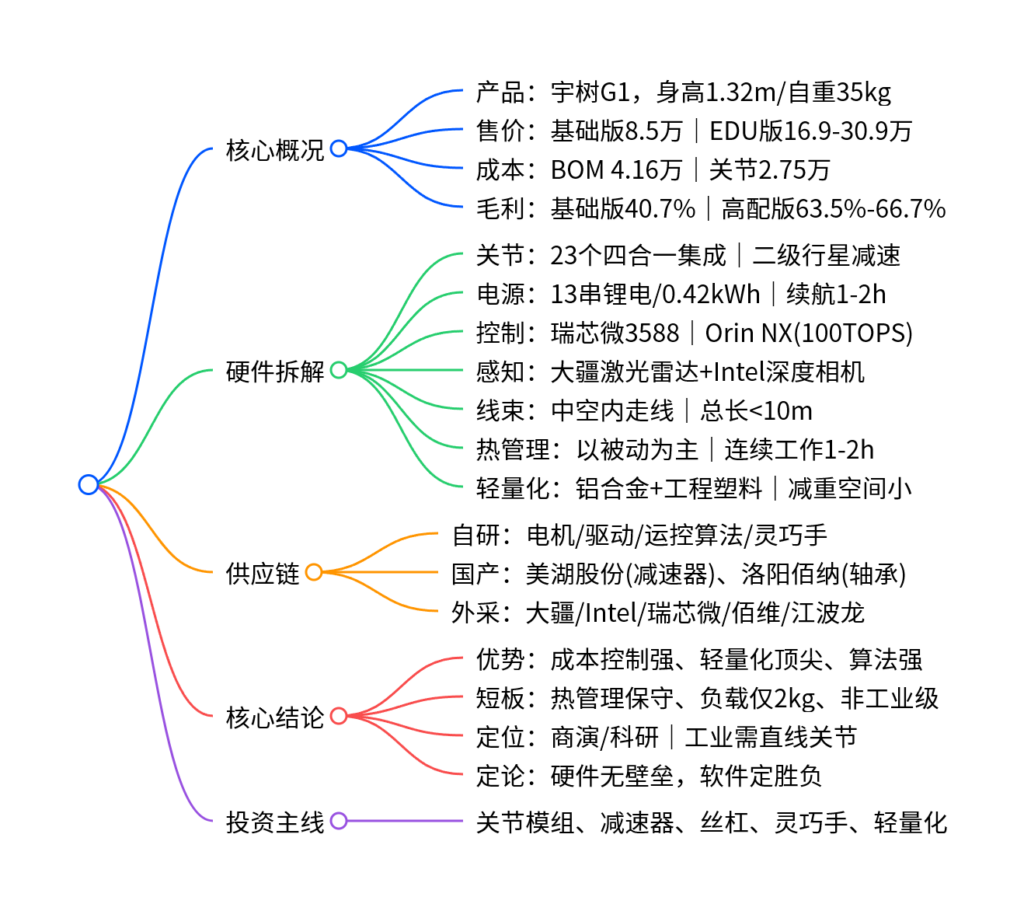
本报告对宇树G1人形机器人进行全拆解分析:基础版售价8.5万元、BOM成本4.16万元、毛利率40.7%,高配版毛利率63.5%-66.7%;核心关节自研四合一集成模组,供应链以自研+国产配套为主;整机35kg极致轻量化,但热管理保守、单臂负载仅2kg,定位商演与科研场景;结论为硬件无壁垒、软件算法是核心壁垒,工业场景需直线关节升级,重点看好关节、减速器、丝杠、灵巧手供应链。
二、思维导图
三、详细总结
1. 售价、成本与盈利(核心数据)
(1)产品配置与定价
| 版本 | 售价(税后) | 核心配置 |
|---|---|---|
| 基础版 | 8.5万元 | 23自由度、续航1-2h、单臂负载2kg |
| EDU标准版 | 16.9万元 | 算力扩展、扭矩升级、负载3kg |
| EDU进阶版 | 20.9万元 | 腰部/手臂自由度提升 |
| 旗舰/专业版 | 25.9-30.9万元 | 搭载五指/三指灵巧手 |
(2)成本与毛利率
-
整机BOM成本:4.16万元
-
关节成本:2.75万元(占比66%)
-
加工费用:0.3万元
-
毛利率:
- 基础版:40.7%
- EDU版:63.5%-66.7%
- 公司前三季度综合毛利:62.9%
2. 核心硬件拆解
(1)关节系统(核心)
- 自由度:23个(14个小关节+9个大关节)
- 结构:电机-行星减速器-编码器-驱动器 四合一集成
- 性能:膝关节最大扭矩90N·m、单臂负载2kg、速度2m/s
- 减速器:二级行星结构,减速比20.58
(2)电源系统
- 电池:13串锂电、容量9000mAh、电量0.42kWh
- 重量:2.5kg、续航:1-2小时
(3)控制系统
- 基础版:瑞芯微3588(6TOPS)
- EDU版:加装Orin NX(100TOPS算力)
- 设计:芯片防逆向处理
(4)感知系统
- 激光雷达:大疆LIVOX MID360
- 深度相机:Intel D435i
- 配置:四麦阵列+5W扬声器
(5)线束与热管理
- 线束:中空内走线、总长<10m、末端电容缓冲
- 热管理:被动为主,仅主控/髋关节主动风冷
- 连续工作:1-2小时,不满足工业重载
(6)轻量化设计
- 整机重量:35kg(行业领先)
- 材质:铝合金+工程塑料,仅小腿连杆用钢
- 结论:减重空间已非常有限
3. 供应链格局
| 类别 | 供应商 | 部件 |
|---|---|---|
| 自研 | 宇树科技 | 电机、驱动板、运控算法、灵巧手 |
| 国产配套 | 美湖股份 | 减速器齿轮 |
| 洛阳佰纳 | 交叉滚子轴承 | |
| 因时/强脑/睿尔曼 | 外采灵巧手 | |
| 佰维、江波龙 | 内存、存储 | |
| 外采 | 大疆 | 激光雷达 |
| Intel | 深度相机 | |
| 瑞芯微 | 主控芯片 |
4. 核心优劣势与定位
(1)核心优势
- 成本与毛利控制极强,规模化放量能力突出
- 轻量化全球顶尖,35kg兼顾运动性能
- 运控算法壁垒深厚,高动态动作领先
- 供应链高度自主,国产配套成熟
(2)核心短板
- 热管理保守,续航与连续作业弱
- 单臂负载仅2kg,无法进入工业场景
- 纯旋转关节存在扭矩/刚性瓶颈
(3)产品定位
- 主打:文娱商演、科研教育、数据采集
- 不适合:工业重载、连续作业场景
5. 行业结论
- 硬件无壁垒:核心器件均可外采/量产
- 软件定胜负:运控算法是核心竞争力
- 工业方向:必须采用直线关节方案
6. 投资主线
- 关节模组、行星减速器、直线关节/丝杠
- 灵巧手、轻量化结构件、传感器
四、关键问题(3个差异化高价值问题)
问题1:宇树G1如何做到8.5万元低价还能保持40.7%毛利率?核心降本路径是什么?
答案:核心来自三点:
- 关节高度集成化:四合一模组简化结构,关节成本仅2.75万;
- 核心部件自研:电机、驱动、算法自研,省去溢价;
- 规模化+国产供应链:减速器、轴承、结构件全面国产化,BOM控制在4.16万。
问题2:宇树G1硬件配置成熟,为何无法进入工业场景?核心瓶颈是什么?
答案:核心瓶颈有三个:
- 单臂负载仅2kg,无法满足工业抓取/搬运;
- 热管理保守,连续工作仅1-2小时,重载易过热;
- 纯旋转关节扭矩密度、刚性不足,工业需直线关节方案。
问题3:报告提出“硬件无壁垒,软件定胜负”,宇树的核心软件壁垒体现在哪里?
答案:宇树核心壁垒在运控算法与机器人世界模型:
- 实现空翻、跑酷、高动态平衡等行业顶尖动作;
- 基于自研RobotWorld Model完成步态规划与避障;
- 算法可在通用硬件上实现远超同行的稳定性与响应速度,是难以复制的核心竞争力。
© 版权声明
免费分享是一种美德,知识的价值在于传播;
本站发布的图文只为交流分享,源自网络的图片与文字内容,其版权归原作者及网站所有。
THE END









暂无评论内容