

实现机器柔性触觉,感知世界触手可及
【原报告在线阅读和下载】:20251121【MKList.com】电子皮肤行业深度报告:实现机器柔性触觉,感知世界触手可及 | 四海读报
【迅雷批量下载】:链接:https://pan.xunlei.com/s/VOXJ23RJHhoECPL5FRrVathfA1 提取码:umqb
【夸克批量下载】:链接:https://pan.quark.cn/s/fe42cc605010 提取码:j4Vv

1. 一段话总结
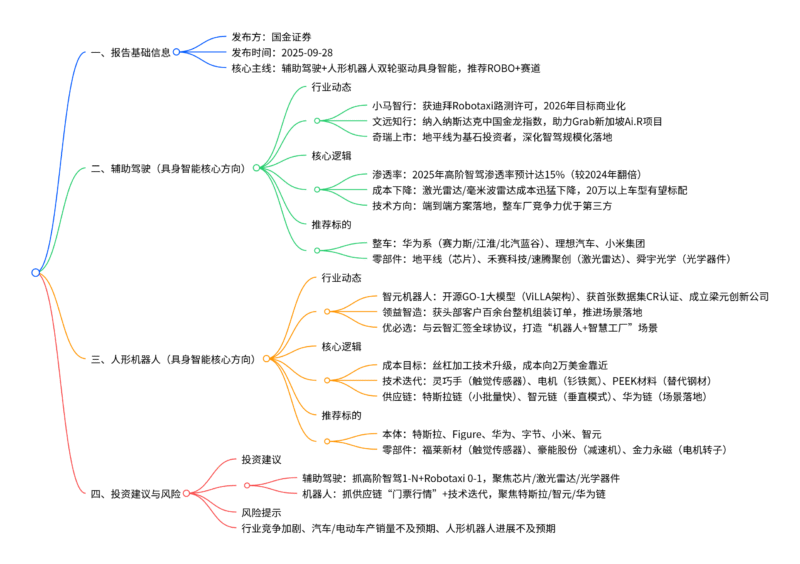
山西证券2025年11月21日电子皮肤行业报告指出,电子皮肤作为模拟天然皮肤的柔性触觉传感器系统,核心功能是为人形机器人提供压力、温度等触觉感知,当前主流技术路线为压阻式(特斯拉、福莱新材等布局,结构简单、成本低),另有电容式(高精度)、压电式(自供电)等路线长期并存;行业存在材料(需兼具柔性/灵敏度/耐用性)、制造(工艺复杂、成本高)、算法(多物理量标定难) 三大核心壁垒,未来以多模态感知(同时检测温度/压力)、阵列化(提升感知精度) 为核心趋势;全球市场目前由海外企业主导(TOP5市占率57.1%),国内福莱新材(中试线投产、小批量供货)、汉威科技(近30家机器人厂商合作)等加速追赶;中性预测2030年全球人形机器人电子皮肤市场规模达7.56亿美元,长期受益于人形机器人十万亿级市场空间,同时需警惕量产不及预期、技术研发滞后等风险。
2. 思维导图(mindmap脑图)

3. 详细总结
一、电子皮肤:人形机器人的“触觉神经”
1. 定义与核心功能
电子皮肤是模拟天然皮肤功能的仿生柔性触觉传感器系统,通过附着在机器人表面,感知压力、温度等外部刺激,为人形机器人实现精准操作(如抓夹、避障)和环境交互提供核心支撑,广泛应用于智能机器人、医疗康复、工业自动化等领域。
机器人触觉感知系统对标人类触觉体系,分为三层结构:
| 层级 | 功能描述 | 核心组件 |
|---|---|---|
| 传感层 | 对标人类皮肤感受器,采集压力、温度等物理信号 | 柔性传感器、信号调理电路 |
| 传输层 | 将物理信号转换为数字信号并传输,类似神经中枢传递动作电位 | 信号转换模块、传输线路 |
| 控制层 | 通过算法分析信号,构建交互对象模型,控制机器人执行动作 | AI算法、数据分析系统 |
2. 技术路线:多路线并存,压阻式为主流
电子皮肤按原理分为五类,压阻式、电容式、压电式为最常用路线,本质是灵敏度、成本、可靠性的三角博弈:
| 技术路线 | 核心原理 | 优点 | 缺点 | 适用场景 | 代表企业/布局 |
|---|---|---|---|---|---|
| 压阻式 | 外力导致电阻变化,转换为电信号 | 结构简单、成本低、响应快 | 迟滞性高、对温度敏感 | 人形机器人、工业自动化 | 特斯拉、福莱新材、汉威科技 |
| 电容式 | 外力改变极板位移,引发电容变化 | 灵敏度高、动态响应快、柔性好 | 压力增大后灵敏度下降、受寄生电容影响 | 医疗设备、消费电子 | 汉威科技、他山科技 |
| 压电式 | 压电材料受力产生极化,将机械信号转电信号 | 自供电、振动传感适配性好 | 不适合静态压力、测量电路复杂 | 爆炸冲击检测、燃烧机监测 | 汉威科技、奥迪威 |
| 光电式 | 压力改变光的强度/波长,通过光学原理检测 | 非接触测量、抗干扰强 | 高功耗、受环境光影响 | – | – |
| 电感式 | 压力改变线圈自感/互感,转换为电信号 | 耐用性强、动态范围宽 | 灵敏度低、磁化效应复杂 | – | – |
二、行业核心壁垒:材料、制造、算法三重挑战
1. 材料端:性能要求严苛,基材与活性材料是关键
电子皮肤由柔性基材、活性功能层、介电材料、电极构成,需同时满足高柔性、高灵敏度、高耐用性:
- 柔性基材:PDMS(聚二甲基硅氧烷)为当前主流,具备低弹性模量、高透明度(90%+),价格1.9万元/吨;PI材料性能优异但成本高(35-100万元/吨),PET柔性不足,仅作辅助;
- 活性材料:需将环境刺激转电信号,主流为碳纳米管、石墨烯等,面临“高灵敏度与宽测量范围难以兼顾”的问题;
- 其他材料:介电材料(如离子液体)、电极(石墨烯、碳纳米管)需兼顾导电性与柔性。
2. 制造端:工艺复杂,低成本量产是关键
当前主流制造工艺各有优劣,高精度与低成本难以平衡:
| 制造工艺 | 优势 | 缺点 | 适用场景 |
|---|---|---|---|
| 光刻与硅蚀刻 | 提升传感器分辨率、灵敏度 | 设备成本高、工艺复杂 | 高精度微结构传感器 |
| 3D打印 | 无需模具、材料兼容性强 | 可打印材料有限、精度低、量产难 | 复杂立体结构传感器 |
| 喷墨打印 | 大面积批量化、流程简化 | 多层对准精度低、难形成高厚度功能层 | 大面积传感器 |
| 丝网印刷 | 高效率、低成本、材料适应性广 | 稳定性差、层间粘附力有限 | 小型化、低成本传感器 |
3. 算法端:多物理量标定难,AI辅助成突破方向
电子皮肤单次测量涉及三维力、温度、硬度等多物理量,传统数学模型标定精度不足,需通过“图形处理系统+AI”构建标定数据库:实际测量时,AI调用数据库参数完成纠偏,解决多变量干扰问题。
三、发展趋势:多模态感知与阵列化是核心
1. 多模态感知:单一器件检测多信号
单一传感机理无法应对复杂场景,需集成压阻/热电、电容/压电等多机理,实现温度、压力、湿度等多信号解耦检测,例如“热电+压阻式”电子皮肤可同时区分温度与压力刺激。
2. 阵列化:提升感知精度与覆盖范围
单个传感单元信息有限,需将单元阵列化(单位面积传感单元越多,分辨率越高):以压阻式为例,阵列化后可通过各单元受力大小与位置,精准还原接触物体轮廓,目前灵巧手传感器阵列已实现每平方厘米集成上百个传感点。
四、市场格局与空间:海外主导,国产加速追赶
1. 竞争格局:海外垄断高端,国产逐步突破
- 海外企业:凭借材料与精密制造先发优势,占据高端市场,全球柔性触觉传感器TOP5(Novasentis、Tekscan、JDI等)市占率达57.1%,产品覆盖AR/VR、医疗、工业机器人等场景;
- 国内企业:依托政策支持与制造优势,缩小技术差距,福莱新材(中试线投产、小批量供货)、汉威科技(近30家机器人厂商合作)、柯力传感(参股猿声科技)等已实现产业化应用。
2. 市场空间:2030年达7.56亿美元,长期受益人形机器人
- 短期(2030年):中性假设下,全球人形机器人销量67万台,单台电子皮肤价值量8000元(手部4000元+其他部位4000元),对应市场规模7.56亿美元(乐观11.29亿、保守3.84亿);
- 长期:人形机器人发展至Lv5级(全面智能),国内需求超1亿台,整机市场规模达10万亿元,电子皮肤作为核心部件,有望维持高速增长。
五、重点标的梳理
| 标的名称 | 核心布局与进展 | 技术优势 | 风险提示 |
|---|---|---|---|
| 福莱新材 | 2025年中试线投产,与灵巧手头部客户小批量供货;推出第二代传感器(真柔性+三维力) | 涂布工艺积累深厚,第二代产品行业领先 | 产业化不及预期、下游验证滞后 |
| 汉威科技 | 10余年研发,掌握压阻/压电/电容核心技术;近30家机器人厂商合作,新产线2025H2投产 | 产品可检测羽毛级压力,百万次弯曲耐用性 | 下游需求不及预期、市场竞争加剧 |
| 柯力传感 | 参股猿声科技,布局多维触觉传感器(MultiDT)与大面积传感器(HexT) | HexT实现单台机器人全身覆盖成本<1万元 | 人形机器人量产滞后、投后管理风险 |
| 申昊科技 | 非接触式电子皮肤小批量应用于操作机器人,用于避障保护 | 聚焦电力/轨道交通场景,适配性强 | 客户拓展不及预期、技术迭代慢 |
| 晶华新材 | 子公司晶智感开发指尖/全掌电子皮肤,与美国TetherIA合作 | 多模态传感器布局,海外市场突破 | 新产品研发失败、原材料涨价 |
| 奥迪威 | 布局触觉传感器与反馈执行器,适配人形机器人感知与执行功能 | 换能芯片技术积累,产品多场景适配 | 下游需求不及预期、外汇政策变动 |
六、风险提示
- 人形机器人量产不及预期:当前人形机器人多处于Lv1级(基础能力),若成本高、性能不足导致量产延迟,将直接影响电子皮肤需求;
- 技术研发不及预期:材料性能优化、制造工艺简化、算法标定精度提升若遇瓶颈,可能延缓商业化进程;
- 政策支持不及预期:电子皮肤依赖战略性新兴产业政策,若支持力度减弱,将降低企业投资积极性;
- 原材料价格上涨:PDMS、碳纳米管等原材料价格波动,可能推高生产成本,挤压利润。
4. 关键问题
问题1:电子皮肤三大技术路线(压阻式、电容式、压电式)在人形机器人场景中的适配性如何?当前为何压阻式成为主流?
答案:
-
人形机器人场景适配性对比:
- 压阻式:人形机器人需平衡成本与基础触觉需求(如抓夹、避障),压阻式结构简单(可快速量产)、成本低(单台手部方案<2000元),且响应速度快(毫秒级),能满足灵巧手等核心部位的压力映射需求,适配工业/服务机器人多场景;
- 电容式:虽灵敏度高(可检测细微纹理),但压力增大后灵敏度下降,且受寄生电容干扰,难以适配机器人全身复杂环境(如油污、振动),仅适合局部高精度感知(如指尖纹理识别);
- 压电式:自供电特性适合恶劣环境,但不支持静态压力检测(无法持续感知抓握力度),且测量电路复杂,仅可辅助用于机器人关节振动监测,难以作为核心触觉方案。
-
压阻式成主流的核心原因:
- 性价比平衡:压阻式成本仅为电容式的1/3-1/2,量产难度低,特斯拉、福莱新材等企业已实现规模化生产;
- 场景匹配度高:人形机器人当前以基础交互(如搬运、简单操作)为主,压阻式的压力检测精度(0.1-100N)可满足需求,无需过度追求高精度;
- 技术成熟度:压阻式材料(如PDMS+碳纳米管)供应链成熟,制造工艺(丝网印刷)可兼容现有产线,而电容式/压电式仍面临材料稳定性、工艺复杂度等问题。
问题2:国内企业在电子皮肤领域的核心竞争优势是什么?与海外企业相比,仍需突破哪些短板?
答案:
-
国内企业核心优势:
- 制造与成本优势:国内具备完整的涂布、印刷产业链,福莱新材依托涂布工艺积累实现传感器低成本量产(中试线产能达标),汉威科技丝网印刷工艺可降低30%制造成本,单台机器人电子皮肤成本较海外低20%-30%;
- 下游绑定紧密:国内人形机器人厂商(如优必选、傅里叶)快速发展,福莱新材、汉威科技已与近30家整机厂合作,从送样到小批量供货节奏快于海外(海外认证周期通常1-2年,国内6-12个月);
- 政策支持:国内将人形机器人列为战略性新兴产业,电子皮肤作为核心部件享受研发补贴、产业链扶持,加速技术迭代(如福莱新材获地方专项研发资金)。
-
需突破的短板:
- 材料性能:海外企业(如Novasentis)活性材料(如EMP机电聚合物)灵敏度达0.1kPa,国内主流材料(碳纳米管基)灵敏度约1kPa,差距显著;PDMS基材长期耐用性(弯曲10万次后性能衰减率)较海外低15%-20%;
- 算法能力:海外企业通过AI标定数据库实现多物理量精准解耦(如Tekscan可同时检测三维力+温度),国内多数企业仍依赖传统数学模型,标定误差较海外高5%-8%;
- 高端市场品牌力:海外企业垄断汽车、医疗等高端场景,国内产品主要集中于工业机器人中低端市场,高端场景认证(如FDA、CE)进展缓慢。
问题3:电子皮肤的“多模态感知”与“阵列化”趋势,将对产业链哪些环节产生直接拉动?相关国内企业已具备哪些技术储备?
答案:
-
拉动的产业链环节:
- 材料环节:多模态感知需集成压阻/热电/压电等多机理,拉动高兼容性活性材料(如复合碳纳米管)、高介电常数介电材料(如陶瓷-聚合物复合材料)需求,国内福莱新材已开发多机理复合活性材料;
- 制造环节:阵列化需提升传感单元密度(从100个/cm²→500个/cm²),拉动高精度光刻设备(如深紫外光刻)、喷墨打印设备需求,汉威科技已引入高精度印刷设备,实现每平方厘米200个传感点;
- 算法环节:多模态数据解耦需AI算法支持,拉动触觉AI芯片、标定数据库建设,柯力传感参股的猿声科技已开发“感算一体”算法,支持多维力实时分析。
-
国内企业技术储备:
- 多模态感知:福莱新材第二代传感器集成压力+温度检测,汉威科技开发热电-压阻复合传感器,可区分0.1℃温度变化与5g压力变化;
- 阵列化:汉威科技灵巧手传感器阵列实现每平方厘米100个传感点,柯力传感参股的猿声科技HexT传感器可灵活贴合复杂曲面,实现全身覆盖(分辨率达1mm);
- 系统集成:申昊科技将电子皮肤与机器人避障算法结合,实现预接触式感知,避免碰撞风险,已小批量应用于电力操作机器人。









暂无评论内容